
I’m Bobby Leary, a Mechanical Engineer in the robotics and autonomous vehicle field working at ISEE as a Staff Software Engineer - Tech Lead of Mapping. I received my PhD in 2019 from Penn State University working in the Intelligent Vehicles & Systems Group.
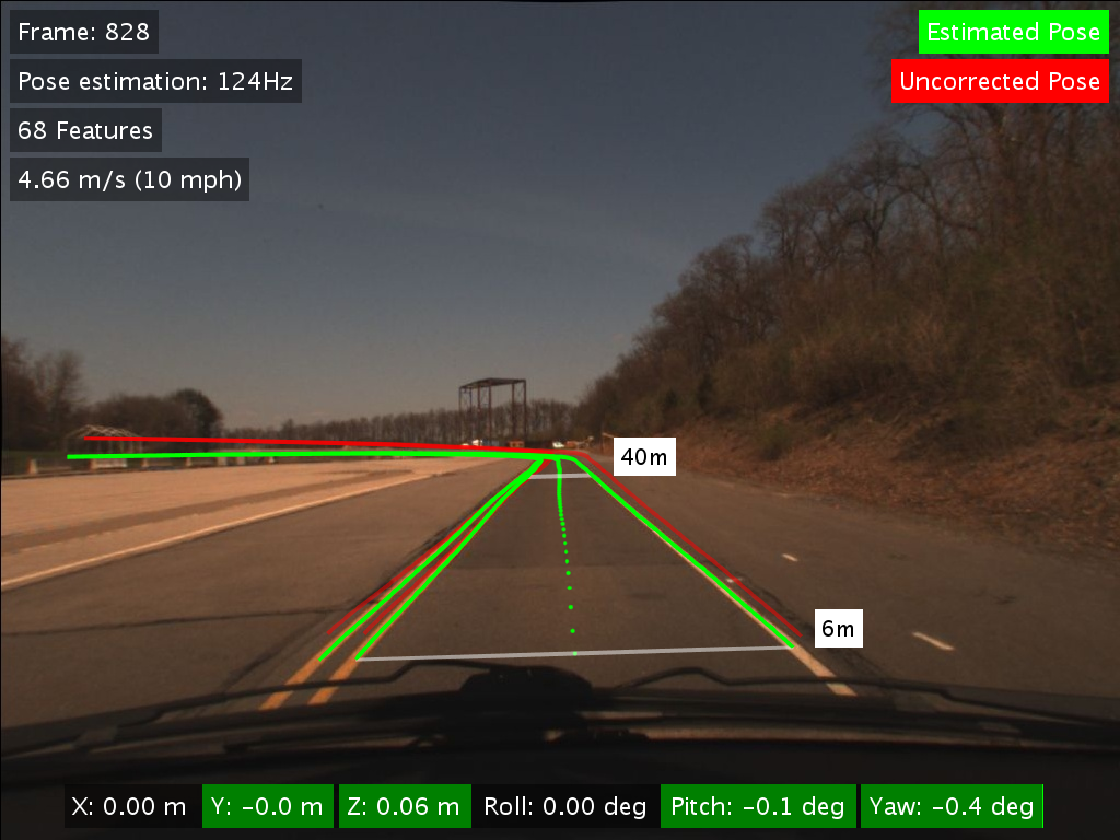
My graduate research focused on autonomous vehicle state estimation and environment perception. I’ve developed methods to estimate the full six degree-of-freedom pose of a vehicle at over 100 Hz using a map and monocular vision, created sparse map databases (SQL) of location-specific lane marker features from LiDAR scans, and designed and built a custom road mapping vehicle. If you are interested in my work, please check out my publication list below.
You can contact me through email, or follow me on Twitter, Instagram, or LinkedIn.
Download my CV
Conference Publications
2021
K. Wolkowicz, R. Leary, J. Moore, S. Brennan
2021 ASME Letters in Dynamic Systems and Control
ROS Integration of External Vehicle Motion Simulations with an AIMSUN Traffic Simulator as a Tool to Assess CAV Impacts on Traffic
L. Gao, W. Bai, R. Leary, K. Varadarajan, S. Brennan
Proceedings of the 2021 Modeling, Estimation and Control Conference
2019
K. Varadarajan, R. Leary, E. Pelletier, M. Wahba, S. Brennan
Proceedings of the ASME 2019 Dynamic Systems and Control Conference
K. Wolkowicz, R. Leary, J. Moore, S. Brennan
Proceedings of the ASME 2019 Dynamic Systems and Control Conference
K. Wolkowicz, R. Leary, J. Moore, S. Brennan
Proceedings of the ASME 2019 Dynamic Systems and Control Conference
2018
Region of Attraction of a Real-time Vehicle Pose Estimator Using Monocular Vision Lane Marker Maps
R. Leary, S. Brennan
Proceedings of the 14th International Symposium on Advanced Vehicle Control
R. Leary, S. Brennan
Proceedings of the IEEE 2018 Conference on Control Technology and Applications
K. Wolkowicz, R. Leary, J. Moore, S. Brennan
Proceedings of the ASME 2018 Dynamic Systems and Control Conference
2016
R. Leary, S. Brennan
Proceedings of the ASME 2016 Dynamic Systems and Control Conference
M. Wahba, R. Leary, N. Ochoa-Lleras, J. Safi, S. Brennan
Proceedings of the ASME 2016 Dynamic Systems and Control Conference
B. McNelly, R. Leary, K. Reichard, S. Brennan
Proceedings of the ASME 2016 Pressure Vessels and Piping Conference
C.J. Lissenden, S. Choi, H. Cho, A. Motta, K. Hartig, X. Xiao, S. Le Berre, S. Brennan, K. Reichard, R. Leary, B. McNelly
Proceedings of the ASME 2016 Pressure Vessels and Piping Conference
C.J. Lissenden, S. Choi, H. Cho, A. Motta, K. Hartig, X. Xiao, S. Le Berre, S. Brennan, K. Reichard, R. Leary, B. McNelly
Proceedings of the ASME 2016 Pressure Vessels Technology
2015
P. Stankiewicz, N. Ochoa-Lleras, R. Leary, S. Brennan
Proceedings of the ASME 2015 Dynamic Systems and Control Conference
Dissertation
Map-based Vehicle State Estimation Using A Spatiotemporal Preview Filter
Masters Thesis
Real-time Vehicle Pose Estimation Utilizing Monocular Vision and Lane Marker Maps
News
Larson Transportation Institute hosts second graders for hands-on STEM - 19 Mar 2018
The road to reality of autonomous vehicles - 15 Sept 2017